


What is UARO?
Product Description
It is the first innovative product in Korea that combines a touch-to-touch coding system with a robot. It is a new concept educational item that helps learners develop comprehensive intelligence such as creativity, logic, thinking, and comprehension by coding and shaping the desired movements by themselves.
A system that can code robot movements at the level of a toddler
- Using the coding board & coding block with domestic patents, anyone can easily code without a computer
A robot manufacturing system that allows you to unleash your free imagination and creativity
- Internationally patented bolt & nut makes it easy and robust for toddlers to build robots of the desired shape
A coding robot that moves, moves, and responds to stimuli
- It can detect the body or object using various sensors, turn on the light or move, and express the movement freely through remote control.
▶Regular Chips
_____________________________________________________________
1.1 Start Chip

Main Function
-Chip that indicates the start of a program
Specific Explanation
-There is no option, and it is fixed to the program screen by default.
-The user starts programming the chip by placing other chips under the starting chip.
Caution
-The starting chip will not be moved.
1.2 DC Motor Chip

Main Function
-A chip that decides speed and direction of the DC Motor
Specific Explanation
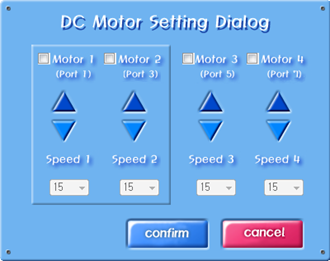
-Press the option button on the DC motor chip to display the DC motor setup dialog box as follows.
How to use the Chatbox
-When the DC motor chip is set, the robot's DC motor moves as set until the next DC motor chip is released.
-To specify how long the set DC motor will move, typically place a delay chip after the DC motor chip.
-In the Port Selection area, you can select the port to which the motor is connected by selecting the check box.

-The direction selection area allows you to select the rotation direction of the motor using the triangle icon.
-The speed selection area allows you to select the operating speed of the motor. The speed can be set from 0 to 15, where 0 represents a stop..
Example

1. The motor operates only when the direction and speed of the DC motor are set and the delay chip is used to allow time for the motor to move.
2. The motor does not stop automatically after the operation time has elapsed, so a DC motor chip with zero speed must be inserted to stop the motor. The example below shows how the motor changes in the direction of rotation every one second.
1.3 Servo Chip

Key Features
-It is a chip that moves the servo motor. The servo motor is designed to move by a given angle, and it can split 220 movements into numbers from a minimum of 1 to a maximum of 214, providing detailed settings.
Detailed description
-Press the option button on the servo motor chip to display the DC Motor Settings dialog box as follows.
dialog box and usage description

-If you check and activate the servo motor on the corresponding output port among the numbers Servo 1 through 5, you can display the scale.
-The semicircular scales represent the servomotor's moving radius, which allows you to click the scale using your mouse or enter a value directly.
precautions
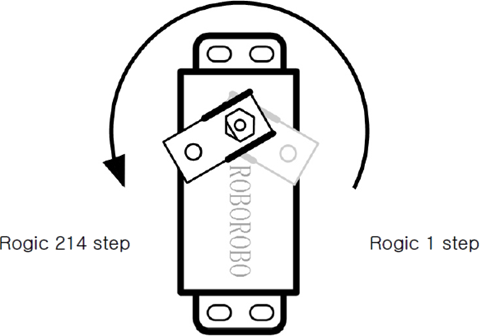
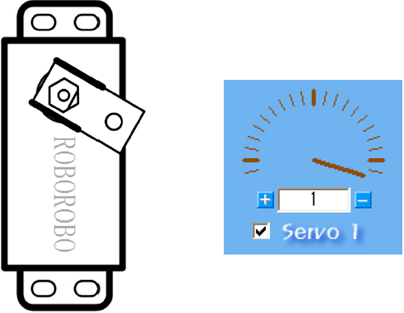
-The triangular grooves on the servo motor shaft (the dents on the white motor shaft) indicate the reference points (zero) on the servo motor.
-The radius of movement of the servo motor is 220 degrees, so 107 steps of the servo motor chip is 90 degrees as shown below.

A sufficient amount of time (approximately 1 second) is required to set the desired angle on the servo motor chip and then move to the target angle.
If the program is made using only the servo motor chip, the servo motor shaft will not reach the target angle and will take the next action.
Reference
-The radius of movement of the servomotor:
-To set the starting point for the servo motor:
Plug the connecting parts into the axis of the servo motor and turn right to the end.
Pull out the connected parts and match the starting point (1 step) as the operating reference.
In the logic program, set the servomotor chip to one step and download it,
By operating the robot, you can see that the servo motor shaft moves to the starting point.
-Real-time movement:
You can connect communication to move the selected servo motor in real-time.

Select the moving servo motor and press the connect button in the upper right corner.
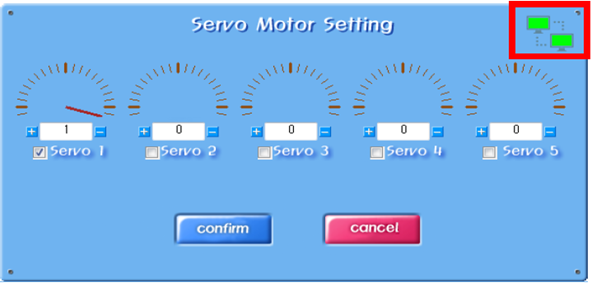
After confirming that the button has been changed to the connected state, you can confirm that the servo motor is moving by changing the value of the selected motor.